Credit: Freethink.com
Researchers from Hong Kong University of Science and Technology (HKUST) and Zhejiang University have created a novel method that enables drone swarms to fly in congested skies.
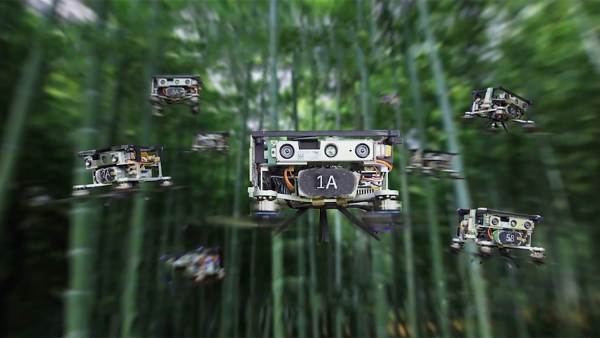
Ten of their robots slice through bamboo thickets in a scenario right out of a sci-fi movie, a first for an autonomous drone swarm. They do this by choosing the best flight paths and avoiding colliding with one another.
The researchers argue in their work, which was published in Science Robotics, that a drone swarm capable of independently traversing challenging, obstacle-filled terrain may serve several useful uses. While the imagination may jump — or at least mine does — to a relentless horde rushing after our hero.
They may patrol the searing front line of a wildfire, distribute supplies after an earthquake or flood, research ecosystems with little human impact, or, more dramatically, serve as the foundation for Mars’ air traffic control systems.
“Being the first swarm system capable of decentralized, autonomous flight in an unstructured environment, this work presents notable contribution to the robotics community,” Enrica Soria, a doctoral assistant at Switzerland’s École Polytechnique Fédérale de Lausanne, unaffiliated with the study, writes in a companion article.
The drone swarm knifes through bamboo thickets, finding optimal flight paths and avoiding running into each other.
Finding a way: Real-world uses of an aerial drone swarm already exist, of course.
But those drones are operating on preprogrammed flight paths — they can only go where they’ve been told to go — “blind and passive,” as Soria puts it.
Such a drone swarm can’t adjust to flying through new places cluttered with uncharted obstacles, like a city street or thick jungle.
“In these scenarios, previously unknown surroundings and narrow corridors combined with requirements of swarm coordination can create challenges,” the study authors write.
The team took inspiration from birds’ ability to flexibly coordinate their flock’s flight path. When our feathered friends are maneuvering through a forest, each one can rely on their senses of sight and balance to adjust, ahem, on the fly.
Their drone swarm took a similar approach, with each tiny, fully autonomous member armed with its own sensors, including a camera for identifying obstacles and neighbors and an ultra wideband sensor to correct for position in midair. All of the sensors are fed into an algorithm in an onboard computer that can form the drone’s flight path within milliseconds.
The drone swarm was then put to the test in a wild bamboo forest, where they avoided obstacles, people, and each other.
The future of drone swarms: Further work will need to optimize a drone swarm capable of navigating dynamic environments on its own. Understanding how the drones can prioritize their behaviors, Soria writes, could help them achieve various tasks more effectively, as well as figuring out how to balance human input with high autonomy.
And while the team’s drones were all the same kind, future swarms may feature different drones with different abilities.
“Research in these directions will give additional momentum to the commercialization and usage of aerial swarms for real-world applications at an unprecedented pace,” Soria writes.
To reach the Global Drone News editorial team on your feedback, story ideas and pitches, contact us here.